Combo unit : HI-MOD A
( 32 - 75 VDC )
Einleitung
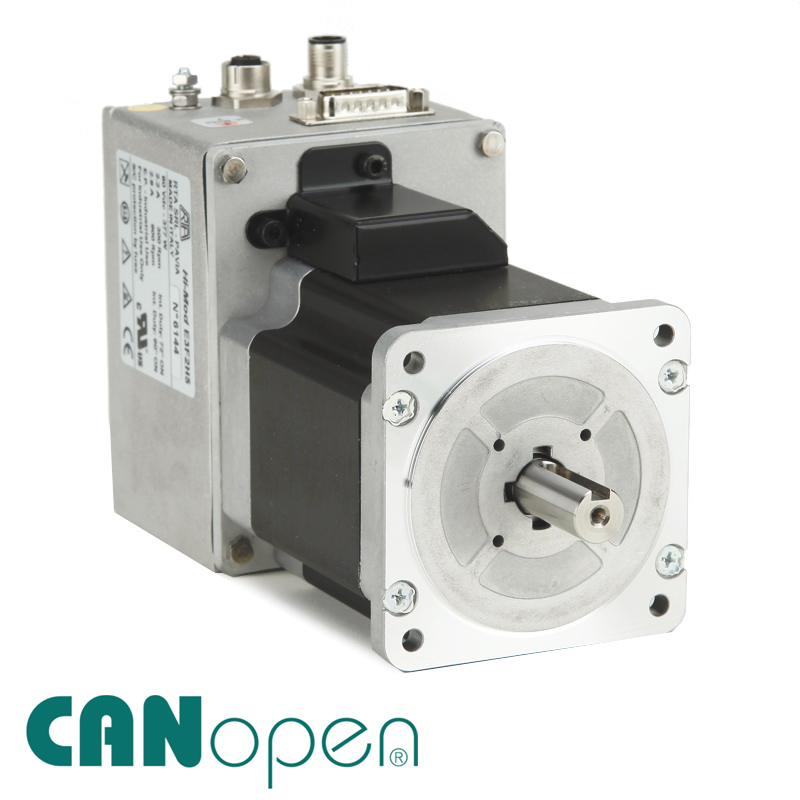
► Series of stepper motors with integrated ministep bipolar chopper drives equipped with programmable motion controller. Setting by means of CANopen interface. It is based on the following versions:
- HI-MOD E with Incremental Encoder
- HI-MOD A with Multi-Turn Absolute Encoder
► Compact system housed in a metallic box mounted on motor body, minimizing dimensions and optimizing wiring and mounting easiness.
► Target: advanced applications requiring the detection of motor loss of synchronism or stall by means of encoder and programmable motion controller setting by means of CANopen interface.
► UL recognized.
HIGHLIGHTS
► Microstepping function up to 3.200 step/rev.
► Communication by means of CANopen interface .
► Command to execute runs with position control to set: distance, direction, speed and acceleration.
► Command to execute zero research (HOMING).
► Possibility to detect motor loss of synchronism or stall and position error by means of Incremental Encoder (HI-MOD E) or high resolution Multi-Turn Absolute Encoder (HI-MOD A).
► The system does not need back-up battery to keep the information when shut down (HI-MOD A).
Technische Daten
► CANopen or Absolute Encoder Multi-turn high resolution.
► Range of operating voltages: 32-75 VDC.
► Microstepping: 400, 800, 1.600 and 3.200 steps /rev. Setting by means of CANopen interface.
► Automatic current reduction at motor standstill.
► Protections:
-Protection against under-voltage and over-voltage.
-Protection against a short-circuit at motor outputs.
-Overtemperature protection.
► Electronic resonance damping circuit to ensure acoustic noise and mechanic vibrations reduction.
► Command to execute runs with position control to set: distance, direction, speed and acceleration.
► Command to execute zero research (HOMING).
► Possibility to detect motor loss of synchronism or stall and position error by means of Incremental Encoder(HI-MOD E) or high resolution Multi-Turn Absolute Encoder (HI-MOD A).
► The system does not need back-up battery to keep the information when shut down (HI-MOD A).